自分の手と作業スキームでロボット掃除機を作るために必要なもの
自分の手で働くロボット掃除機を作るというアイデアは新しいものではありません。手作りの製品が Arduino マイクロコントローラー プラットフォームに登場するとすぐに、愛好家は自分たちに基づいてより深刻なものを開発し始めました。例えば、集合住宅「スマートホーム」やハウスクリーニング。さらに、経済的なバージョンでは、数晩で文字通り膝の上に乗ることができます。
自家製デバイスを作るために必要なもの
ロボット掃除機を工場の掃除機と同じくらい良い (ただし安価) にするのにそれほど時間はかかりません。掃除機のアマチュア デザインの 1 つは、商品の包装に使用される段ボールで作られたパッケージから組み立てられます。箱はそれで作られています。 しかし、通常の美的印象には、それ以上の何かが必要です。それは、プラスチックで接着された掃除機本体か、使い古された工場アシスタント ロボットから借用した既製の要素である可能性があります。
では、彼が最初に必要とするものは次のとおりです。
- Arduino マイクロコントローラー。
- パンまな板。
- 距離計。
- モーター制御装置。
- エンジン。
- 車輪。
- コンピュータークーラー。
- タービン。
- 18650バッテリー。
- 糸。
これは、掃除機の最小構成です。将来的には、掃除機のロボット複合体を近代化し、特定の状況に適応させることができます。
私たちはケースを作ります
すべてをすぐにやりたい場合は、当社の掃除機のケースなしではできません。これには、プラスチック(ポリスチレン、ポリ塩化ビニル)が必要です。
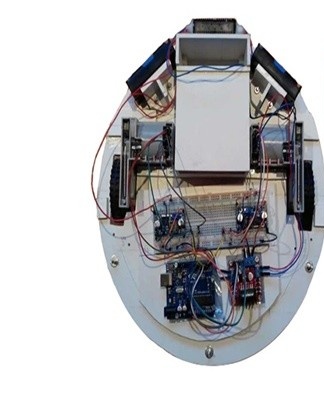
まず、充填物がケース内にどのように収まるかを決定する必要があります。抵抗が最も少ない道をたどれば、箱から出してすぐに掃除機の人間工学を利用できます。それらは通常、ほぼ同じサイズの円盤状です。これは、同じ直径の 2 つの円と掃除機の側壁 (完全なストリップ) を切り取る (作る) 必要があることを意味します。
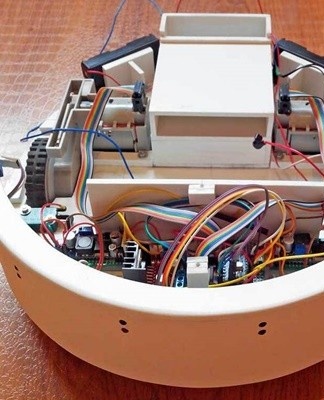
バッテリ コンパートメントは、電源に応じて割り当てられます。広く使用されている 18650 バッテリーを使用することをお勧めします。これらは、ラップトップ、おもちゃ、およびパワーバンクで使用されています。モーションセンサーは前面にあり、掃除機の「動作」を担当します。ホイール、それらのドライブ、中央ボード (Arduino)、および集塵機付きのタービンの位置を必ず考慮してください。
それは、計算の正確さ、部品の配置の完全さに依存します。すぐに、掃除機の設計を根本的に変更するか、小さな近代化に限定する必要があります。ケースの寸法は、マイクロコントローラ、追加ボードのタイプに関連しています。

オリジナルの Arduino には、「Uno」、「Pro」、「Leonardo」の 3 つのグラデーションと、追加のコネクタを備えたボード (「Mega」、「Due」) があります。よりコンパクトなオプションもあります - 「ナノ」、「マイクロ」。そして、それは多くの中国のクローンを数えていませんが、機能的にはそれほど悪くありません.しかし、それは多くの場合、はるかに安いです。
したがって、これらの要因を事前に予測することをお勧めします。そして、掃除機の本体を作成して、アイデアを実装し始めます。直径を 30 センチメートル未満にしないでください。そうでなければ、何も収まりません。空きスペースを使用して、バッテリーを追加したり、ダストバッグを拡張したりすることをお勧めします。
また、ケースの設計では、分解、掃除機の修理の可能性を考慮に入れる必要があるため、内部へのアクセスを提供するために取り外し可能なカバーまたはハッチを作成することをお勧めします。プラスチック部品を作るよりも少し時間がかかります。最初に掃除機のモデルを作成し、ロボットを紙に描く必要があるかもしれません。

しかし、このような戦術的なジェスチャーは、掃除機の改ざんなど、再配置に関連する多くの問題からあなたを救います。多くの場合、このような問題を解消するには、リストされている要件を考慮して、最初の計算であるノードの配置よりも多くの労力が必要です。
また、Arduino マイクロコントローラーではファームウェアとソフトウェアの変更が必要になることを考慮しても問題ありません。これを行うには、ロボットの「頭脳」を大型PCに接続するためのコネクタを取り出すことが不可欠です。そして、すべての要点が特定されたら、掃除機のアイデアを現実に変換し始めることができます。
PVC、ポリスチレン製のケースを選択する場合、適切な組成の接着剤を使用して組み立てます。エポキシ成形部品の接着には適していません。また、「エポキシ」タイルの場合、接着剤にも独自の接着剤が必要です。これを理解することが重要です。
薄い合板(5ミリまで)からでも掃除機本体の組み立てが可能です。厚みが増すと重量が増します。少ないと必要な剛性が得られません。木工作業は難しい作業ではありません。ピースはジグソーでカットされ、ヤスリがけされ、サイズに合わせられ、接着されます。
この場合、ディスクの構成から逸脱して、ロボット掃除機の底面を四角形にすることは許容されます。
そして最後に、最も怠惰な人のためのオプションは、使用できないロボット掃除機からケースを見つけるか、チェーン店の 1 つで既製のものを購入することです。ただし、この場合、寸法を考慮して、事前にコンポーネントを選択する必要があります。それ以外の場合は、本体または詳細のいずれかを変更する必要があります。

ロボット組立
組み立てプロセスには、取り付け、すべての部品の指定された場所への配置だけでなく、ケースの側壁を形成する窓、穴の切断も含まれます。ポリスチレンシートは加熱すると簡単に曲がります。ポットのお湯またはヘアドライヤーを使用できます。

接着するとき、部品は組成物の硬化時間全体にわたって固定されます。より詳細な手順は、接着剤チューブに記載されています。これは通常 24 時間です。エポキシやその他のブランドのコンポーネントの場合、準備時間は異なる場合があります.
ボード、掃除機の本体内の個々のユニットを固定するには、スティックのりでヒートガンを使用することができます。しかし、セルフタッピングねじの留め具は、より信頼性と柔軟性が高くなります。インストールの機械部分は問題を引き起こしません。
子供の頃にレゴコンストラクターで組み立てと分解の練習をしたことがある人なら誰でもアクセスできます。エラーが計算に忍び込まなかった場合、すべての詳細が適切に配置されます。電子機器、モーター、ホイールをほこりから保護することが重要です。このため、集塵機は他のコンパートメントから隔離する必要があります。解決策のオプションは次のとおりです。そこには掃除機の図もあります。
どのように移動するか - 誰もが自分で決めます。単純なホーム アシスタントを作成する場合は、構造を過負荷にすることなく、最小限の詳細で作成できます。
完璧主義者は、掃除機のより複雑なバージョンを選択できます。充電インジケーター、回転ブラシを追加し、車輪で「召喚」して、必要な移動速度を提供します。
同じことがバッテリーの容量を増やす(減らす)場合にも当てはまり、Arduinoボードを追加のセンサーを含むよりコンパクトなものに置き換えます。そして、掃除機の基本バージョンは、週末または2〜3晩で文字通り組み立てることができます。
ファームウェアの入手先とダウンロード方法
ソフトウェア、またはファームウェアは、ロボット掃除機が動かず、ホームアシスタントとしての機能を果たさないものです。 Arduinoボードを購入したのと同じリソース、または自家製の製品が集められたアマチュアサイトの1つで入手できます.
解決策の 1 つとして、開発者は、最も単純で混沌としたクリーニング用に設計されたプログラムを親切に読者と共有しました。一般に、Arduino は愛好家が自分のニーズに合わせてソリューションを作成するためのプラットフォームです。したがって、2 つの方法があります。自分でソフトウェアを作成するか (プログラミングの方法を知っている場合)、誰かの助けを借りて既製のものを入手します。
Arduino、PC、それらの相互作用の原理に関する基本的な知識は不可欠です。自分の能力に自信がない人は、リスクを冒さないほうがいいです。Arduino マイクロコントローラーを同期するには、いくつかの方法があります。ソフトウェアをダウンロードします。
- Arduino IDE を使用します。
- プログラマー;
- 別のArduinoボードへの接続。

1 つ目は、Arduino IDE をダウンロード (またはオンラインで使用) することです。このソフトウェアは、最新のオペレーティング システム (Windows、Linux、Mac OS) で動作します。行動を起こす前に、何が行われているのかを正確に理解することを強くお勧めします。
試行錯誤を通してArduinoでやみくもに何かをすることは、強くお勧めできません。既製の縫製ボードを注文するのが最善です。また、あらかじめUSB接続ケーブルを用意する必要があります。 Arduino の操作に関するすべての情報、そのソフトウェア環境はネット上にあります。それを習得するのは難しくありません、渇望があるでしょう。
Arduino IDE インターフェースは非常にシンプルで直感的です。何かがうまくいかない場合は、いつでも Arduino Wiki の専用セクションに助けを求めることができます。
次の方法は、プログラマーを使用することです。別売りの専用機です。ただし、さまざまなArduinoボードで作業し、ソフトウェアをアップロードすることができます。

最新の提案では、Arduino の 1 つをプログラマーとして使用しています。この方法は他の方法よりも悪くはなく、非常に効果的です。 掃除機を毎回分解せずに提案された各オプションを実装するには、ケース内のボードコネクタへのアクセスを提供する必要があります。 それは、窓、USBコネクタ付きの延長コード、掃除機のカバーの下から取り出したもの、または独自の方法です。使い勝手がよければ。
製品試験
原則として、組み立てられた掃除機は特別なブレークインを必要としません。バッテリーを充電すると、すぐに「戦闘準備完了」になります。操作の最初の数分間で、アップグレードが必要な他のユニットが明らかになります。たとえば、掃除機の車輪。または、ギアボックスとモーターをより低速で信頼性の高いものに交換します。
基本モードでは、掃除機は少なくとも問題なく部屋の中を動き回り、障害物を特定する必要があります。もし彼がゴミ拾いもしていたら、それはそのアイデアが100%成功したことを意味します。
近代化の可能性
完璧に制限はありません。ロボット掃除機をアップグレードすると、機構 (車輪、追加の回転ブラシの取り付け) と電子機器 (Arduino ボード、センサー、充電コントローラーなどの交換) の両方に影響が及ぶ可能性があります。
操作中に掃除機の所有者が本体を塗装したいと思う可能性があります。これにはニトロスプレーエナメルが適しています。または、ソフトウェアを Android 環境に適応させて、掃除機をさらにスマートにすることもできます。しかもスマホでコントロールできる。すでに既成のアイデアとソリューションがあります。そして、自分で何かを作ることができます。Arduino プラットフォームはそのために作られました。